




摘要:本文介绍了多智能体系统协同控制的概念及应用,通信限制下实际多智能体系统协同控制问题,给出了带宽限制下的事件触发/自触发协同控制、传输比特率限制下基于量化通信的协同控制、数据丢包和通信延时下基于预测补偿的协同控制这些常见的协同控制方法解决通信限制下多智能体系统协同控制问题。最后,对通信限制下多智能体系统协同控制未来的研究方向进行了展望。
关键词:通信受限,多智能体系统,协同控制,事件触发控制,自触发控制,量化通信,数据丢包,通信延时,预测补偿控制
1. 引言
多智能体系统是由一定传感、计算、执行和通讯能力的个体组成,各个单元通过网络传递信息,互相协作完成任务。多智能体系统的应用研究非常活跃,其涉及领域较宽,这主要是由于系统的自主性、分布性、实时性等特点所决定的。多智能体系统协同控制已经成为控制学科的一个重要的研究热点,其研究包括编队、包围、蜂拥和群集、跟踪、一致等多个方面。多智能体系统协同控制已经应用于集群机器人、编队飞行、智能电网、协同作战、医疗诊断、协同制造、智能物流、无人艇编队等各个领域,如图1所示。
多智能体系统将通信、控制和计算与物理系统深度融合,是一种典型的信息物理系统。在多智能体系统中,通信网络的传输比特率、通信带宽、网络资源等有限,随着系统规模的扩大,网络中传输的信息量也会增加,导致系统中容易出现通信延时、数据丢包等不良现象,这些不良网络化现象导致接收信息不及时、不连续、缺失和不准确,降低了协同控制性能,甚至导致多智能体系统失稳,无法完成指定的任务。既然通信限制给多智能体系统协同控制带来这么大的不利影响,如何从控制的角度克服通信限制带来的不利影响?

图1 多智能体系统协同控制应用领域

图2 常见的不良网络化现象(a)数据丢包 (b)通信时延[1]
2. 通信限制下多智能体系统协同控制
下面将给出几种常见的协同控制方法解决通信限制下多智能体系统协同控制问题:
2.1 带宽限制下的事件触发/自触发协同控制
事件触发/自触发控制只有当测量误差超过指定阈值时,才触发通信和控制更新,能够有效降低通信和控制更新频率,降低资源消耗和控制开销,避免了连续频繁通信造成的通信带宽紧张,适合于通信带宽有限的通信环境下多智能体系统协同控制。此外,事件触发/自触发控制能给多智能体系统控制带来如下好处:首先,智能体中配备的测量模块、通信模块、微处理器、执行器模块、驱动模块等模块消耗大量的能量,而给智能体提供的能量有限,使用事件触发/自触发控制能够降低系统能量消耗,延长任务执行时间和系统寿命;其次,智能体的通信模块、微处理器、执行器模块具有有限的通信、计算和执行能力,事件触发/自触发控制能够降低通信和计算量,降低控制开销,使得智能体能够执行所设计的控制方案;最后,当系统运行在稳态并且不受到干扰影响时,无需实时监视系统状态、与邻居智能体通信、以连续方式执行控制指令,事件触发/自触发控制可以节约通信资源,提升通信效率。我们在前期工作[2-3]给出了多智能体系统固定时事件触发控制方案。典型的事件触发控制方案如图3所示[4]。
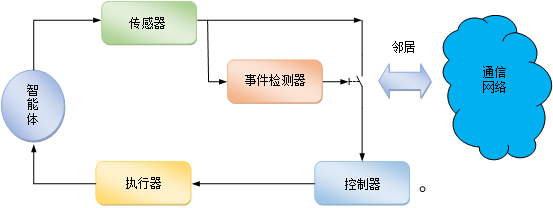
图3 典型的事件触发控制方案[4]
2.2 传输比特率限制下基于量化通信的协同控制
实际的多智能体系统通信网络受到传输比特率的限制,无法传输实值信息。在受到传输比特率限制的多智能体系统通信网络中,通常采用量化通信的方式传递信息,在发送端将实值信息量化为有限符号并进行编码,以数字信号的形式传输信息,在发送端进行解码,得到实值信息。这种通信方式具有强的反拥塞能力、高的安全性、易于实施和维护、强的鲁棒性和远距离传输等优点。然而,由于量化造成的不精确信息给协同控制协议的设计带来了困难。我们在前期工作[5]中克服了这一困难,提出了基于量化通信的固定时一致性控制方法,实现了传输比特率限制下多智能体系统固定时一致性跟踪,所设计的基于量化通信的控制方案如图4所示。
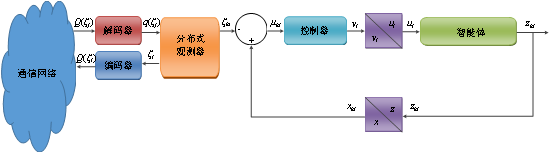
图4 基于量化通信的协同控制方案
2.3 数据丢包和通信延时下基于预测补偿的协同控制
实际的多智能体系统中,由于过饱和的通信连接、信道衰减、噪声干扰、发射器和接收器之间过远的距离、执行器故障、传感器故障和网络攻击,容易发生数据丢包现象。数据丢包随机改变通信拓扑,引入协同控制误差,降低控制性能,甚至造成系统失稳。此外,在实际多智能体系统中,由于有限的通信容量和通信带宽,当大量信息频繁通过通信连接交互时,容易导致信息碰撞和信息重传,进而导致通信延时。通信延时降低协同控制性能,甚至破坏多智能体系统稳定性。数据丢包和通信延时导致智能体无法及时收到实时信息,这给协同控制协议的设计带来困难。针对网络中出现的通信延时和数据丢包,我们在前期工作[6-7]中设计了一种预测器,预测在数据丢包和通信延时发生后,当前时刻邻居智能体的状态,设计了一种基于预测补偿的协同控制方案,实现了数据丢包和通信延时下多智能体系统固定时一致性跟踪,所设计的数据丢包和通信延时下基于预测补偿的控制方案如图5所示。

图5 数据丢包和通信延时下基于预测补偿的控制方案
3. 结论与展望
本文介绍了多智能体系统协同控制的概念及应用,通信限制下实际多智能
体系统协同控制问题,给出了带宽受限下的事件触发/自触发控制、传输比特率限制下基于量化通信的控制、数据丢包和通信延时下基于预测补偿的控制这些常见的协同控制方法解决通信限制下多智能体系统协同控制问题。通信限制下多智能体系统协同控制还有很多值得研究的方向,例如,基于编码器-解码器的动态事件触发协同控制、随机丢包环境下事件触发协同控制、通信延时下量化协同控制、其他通信限制下多智能体系统协同控制。
参考文献
[1] https://blog.csdn.net/dragon11123123/article/details/114853412
[2] J. K. Ni, P. Shi, Y. Zhao, Q. Pan and S. Y. Wang, “Fixed-time event-triggered output consensus tracking of high-order multiagent systems under directed interaction graphs,” IEEE Trans. Cybern., vol. 52, no. 7, pp. 6391-6405, Jul. 2022
[3] J. K. Ni, F. Y. Duan, P. Shi, “Fixed-time consensus tracking of multiagent system under DOS attack with event-triggered mechanism,” IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 69, no. 12, pp. 5286-5299, Dec. 2022[4] L. Ding, Q.-L. Han, X. H. Ge and X.-M. Zhang, “An overview of recent advances in event-triggered consensus of multiagent systems,” IEEE Trans. Cybern., vol. 48, no. 4, pp. 1110-1123, Apr. 2018
[5] J. K. Ni, C. Y. Wen and Y. Zhao, “Fixed-time leader-follower quantized output consensus of high-order multi-agent systems over digraph,” Inf. Sci., vol. 587, pp. 408-434, Mar. 2022
[6] J. K. Ni, P. Shi, Y. Zhao and Z. H. Wu, “Fixed-time output consensus tracking for high-order multi-agent systems with directed network topology and packet dropout,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 817-836, Apr. 2021
[7] J. K. Ni, Y. Zhao, J. D. Cao and W. L. Li, “Fixed-time practical consensus tracking of multi-agent systems with communication delay,” IEEE Trans. Netw. Sci. Eng., vol. 9, no. 3, pp. 1319-1334, May/Jun. 2022
科普作品简介:
该论文介绍了多智能体系统协同控制的概念及应用,通信限制下实际多智能体系统协同控制问题,给出了带宽限制下的事件触发/自触发协同控制、传输比特率限制下基于量化通信的协同控制、数据丢包和通信延时下基于预测补偿的协同控制这些常见的协同控制方法解决通信限制下多智能体系统协同控制问题。最后,对通信限制下多智能体系统协同控制未来的研究方向进行了展望。
作者简介:\
倪骏康,西北工业大学特任研究员,博士生导师。主要从事多智能体系统协同控制、信息物理系统容错控制、固定时控制理论及应用等领域的研究。主持国家自然科学基金面上项目、国家自然科学青年基金、第八届中国科协青年托举工程项目、陕西省自然科学基金、装备预研航天联合基金等项目,在IEEE TCYB、IEEE TSMCA、IEEE TIE、ACC、IFAC World Congress等期刊和会议上发表论文50余篇,ESI高被引6篇,担任CCC、IECON等多个国际会议执行主席、分会主席,担任全国集群智能与协同控制大会、CSIS-IAC等会议的程序委员会委员。授权发明专利7项,软件著作权2项,获2021陕西省高等学校科学技术研究优秀成果二等奖,担任中科院一区TOP期刊IEEE/CAA JAS青年编委,中国自动化学会和指挥与控制学会高级会员,担任IFAC Technical Committee on Large Scale Complex Systems委员,担任中国指挥与控制学会青工委委员、智能控制与系统专委会委员,担任Automatica、IEEE TCYB、IEEE TSMCA、IEEE TFS、IEEE TIE等40余个高水平期刊审稿人,入选第八届中国自动化学会青年人才托举工程。
