




西安交通大学曹晔助理教授作了题为“非线性系统约束控制与应用研究”的报告,介绍了近年来在状态约束和性能约束方面的研究成果,以及相关约束控制方法在建筑机器人领域的应用。

曹晔助理教授作报告
南方科技大学王建坤助理教授作了题为“AI-driven Robot Task and Motion Planning”的报告,详细介绍了机器人任务和运动规划的理论与应用,涵盖视觉-语言人机交互及复杂物体操作的实际案例。

王建坤助理教授作报告
清华大学杨赟杰助理研究员作了题为“倾转旋翼飞机动力学建模及控制”的报告,介绍了倾转旋翼飞机在高速巡航与垂直起降中的优势及广阔应用前景,总结了不同构型倾转旋翼飞机的动力学建模方法和控制策略,展示了该领域的近期研究进展。

杨赟杰助理研究员作报告
中国科学院自动化研究所王隽副研究员作了题为“面向恶劣成像环境的鲁棒视觉智能感知”的报告,探讨了视觉感知在自主无人系统中的重要性及其面临的挑战。通过深度强化学习和提示学习等前沿AI技术,对成像、质量增强和评估进行深入研究。
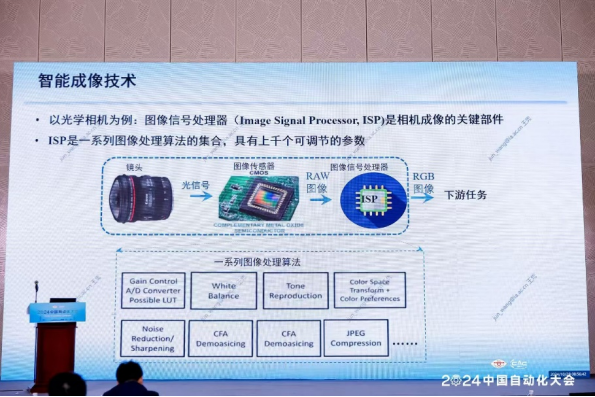
王隽副研究员作报告
江南大杨杰龙副教授作了题为“多智能体网络半监督与无监督学习浅谈”的报告,探讨了多智能体网络的半监督和无监督学习,提出了TSLG和CGNN模型,并在传感器网络、社交网络等领域展开了无监督学习的研究。

杨杰龙副教授作报告
湖南大学华和安副研究员作了题为“空中机器人学习驱动的规划控制与集群协同”的报告,从低空经济需求出发,详细介绍了空中机器人在运动规划、智能控制、集群协同等技术难题方面的进展和应用前景。

华和安副研究员作报告
西北工业大学副教授李玉珂作了题为“自动驾驶复杂电磁环境下的智能雷达波形设计”的报告,讨论了自动驾驶环境中多样化动态目标及复杂电磁干扰对传统波形设计的挑战,提出了多普勒鲁棒和欺骗性干扰鲁棒的智能优化波形设计方案,有效应对高速移动场景和多雷达环境中的漏检与虚警问题,为高质量目标检测提供技术支持。

李玉珂副教授作报告
北京理工大学李卓副教授作了题为“面向时空信号场探测的无人系统轨迹规划方法”的报告,从低空经济需求出发,详细介绍了空中机器人在运动规划、智能控制、集群协同等技术难题方面的进展和应用前景。

李卓副教授作报告
中国科学院自动化研究所王晨副研究员作了题为“面向脑功能疾病患者的智能康复辅助系统研究”的报告,阐述了评估与训练一体化的智能康复系统,包括康复辅助机器人平台的研发、自适应人机交互方法,以及神经肌骨多层面功能障碍的精准分析。
王晨副研究员作报告
华中科技大学刘骁康副教授作了题为“Rank-one perturbation and its applications to DC Microgrids: Stability analysis”的报告,基于一阶扰动问题,探讨其在正稳定矩阵上的应用,并将理论应用于直流微电网的稳定性分析。

刘骁康副教授作报告
苏州大学陆波副教授作了题为“面向腔镜手术子任务的机器人智能自主关键技术研究”的报告,聚焦在手术机器人的自主导航和任务操作方面的研究,探索AI与机器人在微创手术中的应用。

陆波副教授作报告
中南大学潘冬副教授作了题为“多源视觉协同的高炉铁口铁水流温度场在线检测方法及应用”的报告,提出了在复杂环境下基于多源视觉的温度场检测方法,提升了铁水流温度的实时检测精度。

潘冬副教授作报告
北京理工大学黄销助理教授作了题为“动态受限环境下机器人双臂协调操作与人机安全协作控制”的报告,探讨了机器人在复杂未知环境中自主完成仿人灵巧操作的挑战。报告提出了一种基于约束投影矩阵的多任务灵巧运动规划方法,介绍了模型预测轨迹引导的无模型强化学习策略,提高机器人技能学习的效率和适应性。

黄销助理教授作报告
中国科学院自动化研究所王佳星副研究员作了题为“面向运动功能重建的脑机协同主动康复技术研究”的报告,针对脑卒中患者的运动功能康复,探讨如何增强神经参与,实现更有效的肢体功能恢复。

王佳星副研究员作报告
北京大学崔洋洋助理研究员作了题为“控制力矩陀螺精细抗扰控制方法”的报告,介绍了控制力矩陀螺在我国空间站建设和航天器大机动等重大航天任务中的关键作用。报告分析了其性能受刚-挠-机-电多来源复合干扰的影响,并探讨了在“时间、空间、算力”等约束条件下,实现精细抗扰控制的理论研究与工程应用。

崔洋洋助理研究员作报告
中国科学院自动化研究所王雨桐副研究员作了题为“面向长尾数据的缺陷检测与异常检测方法研究”的报告,强调了缺陷检测和异常检测在工业制造与交通运输中的重要性,探讨了如何提升模型对罕见异常的检测能力,并提出了一种兼顾召回率与准确率的创新算法,为相关领域提供了重要的理论和实践支持。

王雨桐副研究员作报告
国防科技大学陈谢沅澧副教授作了题为“动态环境中智能移动机器人鲁棒自主定位”的报告,介绍了课题组在动态目标识别、语义定位、闭环重定位等方面的研究进展,旨在提升机器人在动态场景中的定位能力。

陈谢沅澧副教授作报告
中国科学院自动化研究所王健副研究员作了题为“智能仿生机器海豚的运动优化与跟踪控制研究”的报告,面向机器海豚的多模态运动特性,报告了仿生机器海豚的运动优化、轨迹和地形跟踪等控制研究成果。

王健副研究员作报告
北京科技大学王志闯副教授作了题为“长续航仿鹰扑翼飞行机器人系统设计与优化”的报告,介绍了该领域的最新研究进展,以鹰为仿生对象,提出了一种基于质量分配和能耗估计的仿鹰扑翼飞行机器人设计方法,并使用该方法设计了一款负载能力大、续航时间长、可操作性强、稳定性高的仿鹰扑翼飞行机器人。

王志闯副教授作报告
南开大学陈盛泉副教授作了题为“细胞异质性刻画与细胞类型辨识方法研究”的报告,重点介绍了在处理高维、高噪声、稀疏性的单细胞数据方面,通过无监督和弱监督学习,研究数据增强和离散表征方法,以实现细胞异质性刻画和基因调控解析。

陈盛泉副教授作报告
中国地质大学(武汉)余万科教授作了题为“基于分布不相似度和Lasso惩罚的无监督故障检测与诊断”的报告,介绍了无监督故障检测方法的现存缺陷。提出了一种新方案,通过带Lasso惩罚的非凸优化最大化数据集间的分布差异,展示了如何将该优化问题转化为迭代凸优化,利用KKT条件简化问题,并采用可行梯度方向法求解,验证了该方法的优越性。

余万科教授作报告
北京交通大学张慧讲师作了题为“面向智能机器的车路群智协同研究与实践”的报告,介绍了现代城市交通系统中复杂场景对交通管理和智能交通系统的挑战。探讨了利用多视角和多模态信息进行协同感知的重要性,介绍了基于注意力机制的方法,实现多模态信息的融合,并讨论如何将这些数据转化为对交通场景的高层次理解。

张慧讲师作报告
中国科学院数学与系统科学研究院赵成副研究员作了题为“Tracking Performance and Antidisturbance Ability of PID Control”的报告,讨论了广泛应用的比例-积分-微分控制器跟踪性能和抗干扰能力。关注于一类基本二阶非线性随机控制系统,分析了PID控制器在应对模型不确定性和外部干扰时跟踪时变参考信号能力。展示了如何选择PID增益以确保系统在均方意义上稳定,证明了稳态跟踪误差的上界与参考信号和干扰变化率及随机噪声强度成正比。

赵成副研究员作报告
会议中,任鹏举教授、司小胜教授、和望利教授和孟敏教授先后对青托项目给予了详尽点评,肯定了各位青年科技人才的研究,并强调大家在科研工作中要找准定位,聚焦主责主业,做出有特色的前沿研究。
